Scanneur

Utiliser cette image
Puis-je réutiliser cette image sans autorisation? Oui
Les images sur le portail de la collection d’Ingenium ont la licence Creative Commons suivante :
Copyright Ingenium / CC BY-NC-ND (Attribution-NonCommercial 4.0 International (CC BY-NC 4.0)
ATTRIBUER CETTE IMAGE
Ingenium,
2017.0013.001
Permalien:
Ingenium diffuse cette image sous le cadre de licence Creative Commons et encourage son téléchargement et sa réutilisation à des fins non commerciales. Veuillez mentionner Ingenium et citer le numéro de l’artefact.
TÉLÉCHARGER L’IMAGEACHETER CETTE IMAGE
Cette image peut être utilisée gratuitement pour des fins non commerciales.
Pour un usage commercial, veuillez consulter nos frais de reproduction et communiquer avec nous pour acheter l’image.
- TYPE D’OBJET
- prototype
- DATE
- 2011
- NUMÉRO DE L’ARTEFACT
- 2017.0013.001
- FABRICANT
- Inconnu
- MODÈLE
- uGPS Rapid Mapper
- EMPLACEMENT
- Inconnu
Plus d’information
Renseignements généraux
- Nº de série
- S/O
- Nº de partie
- 1
- Nombre total de parties
- 1
- Ou
- S/O
- Brevets
- S/O
- Description générale
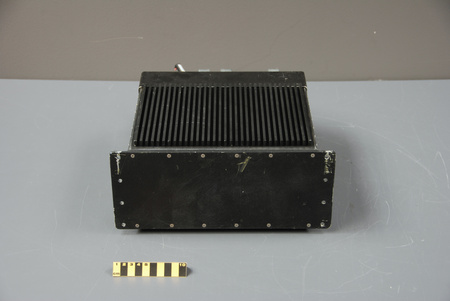
- Synthetic casing with metal brackets, screws and connectors
Dimensions
Remarque : Cette information reflète la taille générale pour l’entreposage et ne représente pas nécessairement les véritables dimensions de l’objet.
- Longueur
- 48,0 cm
- Largeur
- 31,0 cm
- Hauteur
- 53,3 cm
- Épaisseur
- S/O
- Poids
- S/O
- Diamètre
- S/O
- Volume
- S/O
Lexique
- Groupe
- Mines et métallurgie
- Catégorie
- Divers
- Sous-catégorie
- S/O
Fabricant
- Ou
- Inconnu
- Pays
- Inconnu
- État/province
- Inconnu
- Ville
- Inconnu
Contexte
- Pays
- Inconnu
- État/province
- Inconnu
- Période
- Inconnu
- Canada
-
Dr. Jon Peck, who holds a PhD and MSc in Mining Engineering from McGill, is a leading expert in the automation of mobile mining equipment. He is recognized internationally for his work in this field. In 2015, Dr. Peck has been inducted to the International Mining Technology Hall of Fame for his work on automation of surface mining technologies. Dr. Peck’s research on automation dates back to the Canadian Center for Automation and Robotics in Mining. This little documented, but extremely important Centre was created jointly by Ecole Polytechnique and McGill in 1988, and operated at McGill until 1996. The CCARM was led by researchers such as Dr. John Edwards, Dr. Laeeque Daneshmend and Andre Peacher, who continued there the work earlier conducted at the Noranda Research Centre. The Noranda Centre and CCARM were at the core of most of mining R&D, and the entire Canadian automated and remote mining community has its roots in these institutions. When CCARM lost its funding, Dr. Peck moved to Queen’s University, where he served as the Head of the Department of Mining Engineering. In this position, he not only developed new technologies but also supervised PhD research of a younger generation of mining engineers, who are today responsible for designing technologies for mining from deep sea to space. In 1992, Dr. Peck founded Aquila Mining Systems Ltd. which designed an Advanced Monitoring and Positioning Platform. The product was sold to Caterpillar in 1996 and is now a standard platform in surface mining operations. At Aquila, Dr. Peck was responsible for pioneering of the real-time high precision GOS guidance for blasthole drills and cable shovels and drill monitoring with rock recognition capabilities. In fact, all subsequent work on rock recognition has been based on Dr. Peck’s research. In 2004, Dr. Peck created Peck Tech, where he continues to work on augmented GPS devices, advanced rock recognition algorithms, and autonomous drill operations. He also advices mining companies around the world on automation and remote mining. Dr. Peck continues to educate and mentor a new generation of Canadian mining engineers through his work at Queen’s, McGill and Concordia. Dr. Sandy Pyke is an Electronic Technologist, software engineer and hardware architect. He worked with Dr. Peck at Aquila in the 1990s, and then continued developing the monitoring and positioning platforms at Caterpillar. He built prototypes of Aquila’s and Peck Tech’s technologies. Dr. Pyke rejoined Peck at Peck Tech in 2004. (Taken from the Acquisition Proposal, see Ref. 1) - Fonction
-
To test uGPS scanning potential - Technique
-
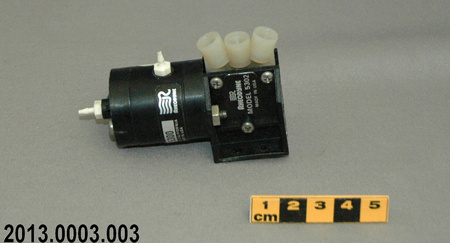
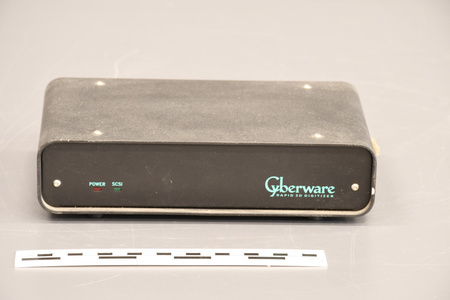
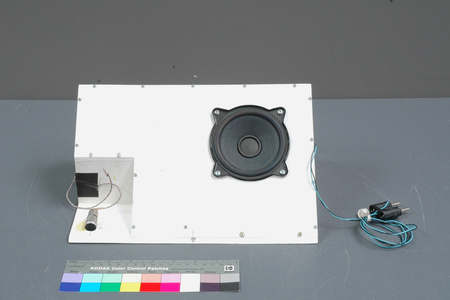
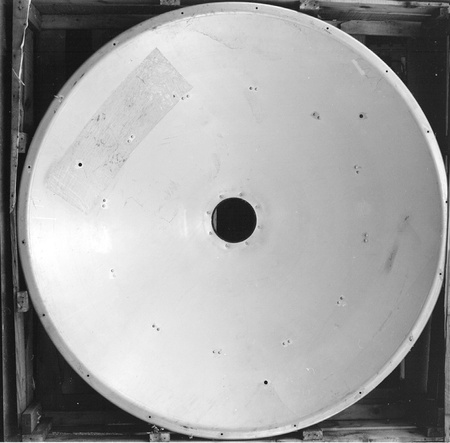
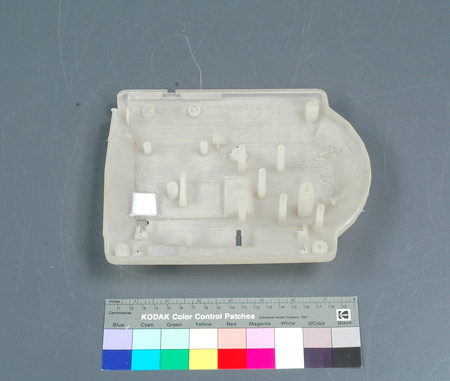
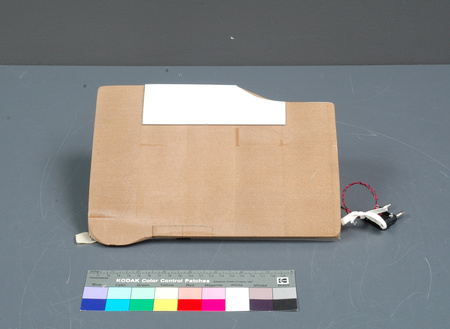
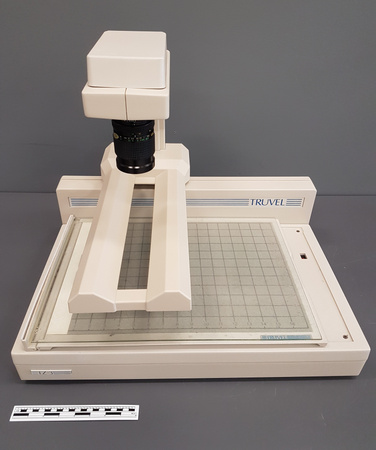
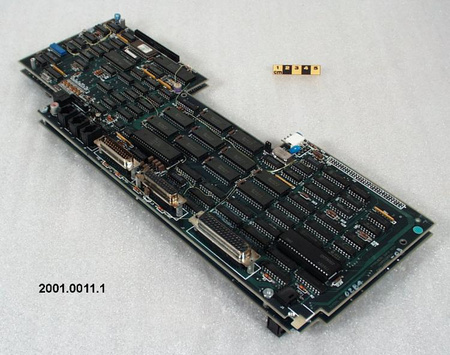
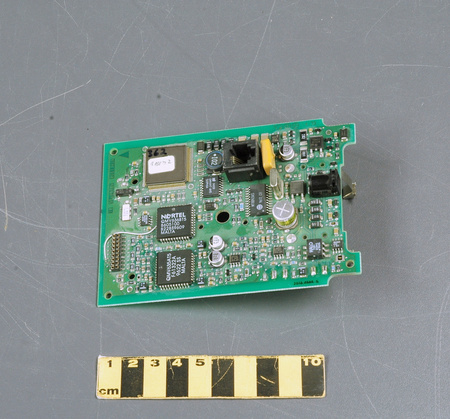
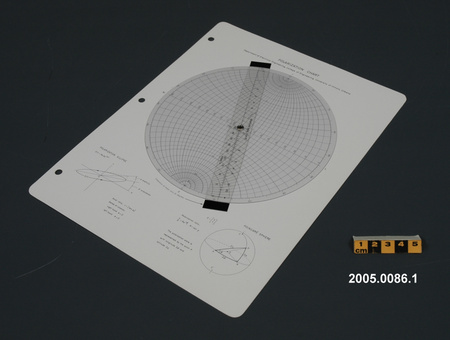
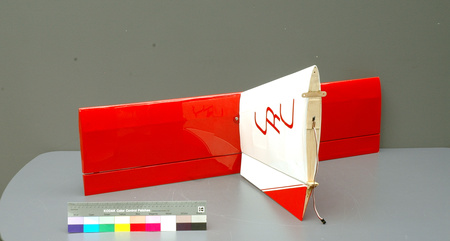
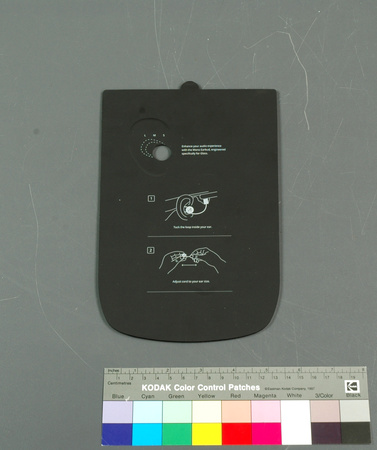
This is a prototype of the uGPS Rapid Mapper. This type of scanning technology was first explored at Queen’s University Mining Systems Labs under the supervision of Dr. Joshua Marshall, who with a group of students began to research and develop technologies necessary to build a scanner. In 2011, Dr. Peck’s team further the research and developed a prototype of the device. Dr. Sandy Pyke built the prototype from custom made pieces. The technology was first intended as an underground precision positioning system. It was tested at a Barrick Gold mine in North America and proved to be accurate comparing to surface GPS. At this point Pech Tech team realized that the technology had a potential for volumetric mapping of underground mines. The stages of the development are clearly visible in the prototype that we are acquiring. The prototype is open and we can see controls for GPS, RFID and scanners. (Taken from the Acquisition Proposal, see Ref. 1) - Notes sur la région
-
Inconnu
Détails
- Marques
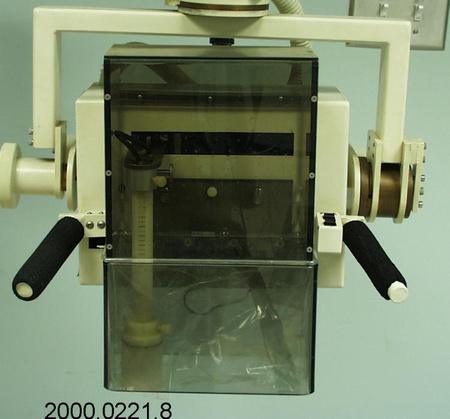
- On the proper top and proper front: "PECK TECH/ CONSULTING LTD."/ On a series of labels on the proper back: "DC out 24V"/ "GPS"/ "RFID"/ "DC in/ 6- V"/ "PoE"/ "Mine "/ "Eth C"/ "Eth B"/ "Eth A"/ "WiFi"/
- Manque
- Appears complete
- Fini
- Scanner is predominantly light grey with a black arm connected to a black and grey scanning head. There are several black and silver-coloured metal connectors on the proper back and a black circular part on the proper top. There are white labels with black markings and a black, grey and red logo. Attached to the scanning head and to the proper back are a series of black and green cables with black connectors.
- Décoration
- S/O
FAIRE RÉFÉRENCE À CET OBJET
Si vous souhaitez publier de l’information sur cet objet de collection, veuillez indiquer ce qui suit :
Fabricant inconnu, Scanneur, vers 2011, Numéro de l'artefact 2017.0013, Ingenium - Musées des sciences et de l'innovation du Canada, http://collection.ingenium.ca/fr/id/2017.0013.001/
RÉTROACTION
Envoyer une question ou un commentaire sur cet artefact.
Plus comme ceci
































































2017.0013.001
